Tradução:






Artigos
Pontos de referência utilizados no espaço
 Joaquim Daniel
Joaquim Daniel
 27/06/2022
27/06/2022
No nosso quotidiano para indicar a localização de alguma coisa ou a distância de um lugar para o outro, somos obrigados a mencionar algo já conhecido por nós, para facilitar a localização da mesma. Fisicamente falando, este algo já conhecido, chamamos de sistema de referência ou referencial. O conceito de movimento e repouso é relativo, tomemos como exemplo o seguinte: um carro em movimento, uma pessoa a dirigir com alguém no acento de trás e uma pessoa fora do carro em repouso em relação a estrada. Consideremos como A (motorista), B (a pessoa no acento de trás), C (a pessoa parada fora do carro) e D (pessoa em repouso em relação a estra). Portanto, surge a seguinte questão, quem está em movimento? Quem está em repouso? Para respondermos a questão, precisamos saber antes em repouso ou em movimento em relação a quê?
No caso dos satélites, para definirmos a órbita do satélite, o primeiro passo importante é especificarmos o referencial, o qual significa especificar o sistema de coordenadas. Para definirmos o sistema de coordenadas devemos fazer quatro (4) especificações.
A primeira especificação é a origem, o qual define o centro e o ponto de partida do sistema de coordenada. Os exemplos de origens incluem:
- O centro do Sol (heliocêntrico);
- O centro da terra (geocentro);
- A posição do observador (topo centro);
- O centro de massa do satélite ou sistema (baricentro).
A segunda especificação é o plano fundamental, o qual contem dois (2) eixos do sistema de coordenadas. Os exemplos de planos fundamentais incluem:
- O eclíptico – o plano orbital Terra-Sol;
- O equatorial – o plano normal do eixo de rotação da Terra;
- O horizontal – o plano tangente à elipsóide achatada da terra num específico ponto da terra;
- O plano orbital.
A terceira especificação é a direcção principal. Os exemplos de direcções principais incluem:
- O equinox vernal – definido como a linha de interceção entre a eclíptica e o equador terreste;
- O meridiano de Greenwich – o plano do meridiano da terra que passa através do Greenwich, Inglaterra;
- O meridiano local – o plano do meridiano da terra que passa através da posição de um observador;
- O nodo ascendente – interseção entre o plano orbital e plano de referência.
A quarta especificação é o terceiro eixo, o qual é encontrado utilizando a regra da mão – direita. Os exemplos de terceiro eixo incluem:
- O polo eclíptico;
- O polo Norte;
- O zenith local;
- O vector momento angular.
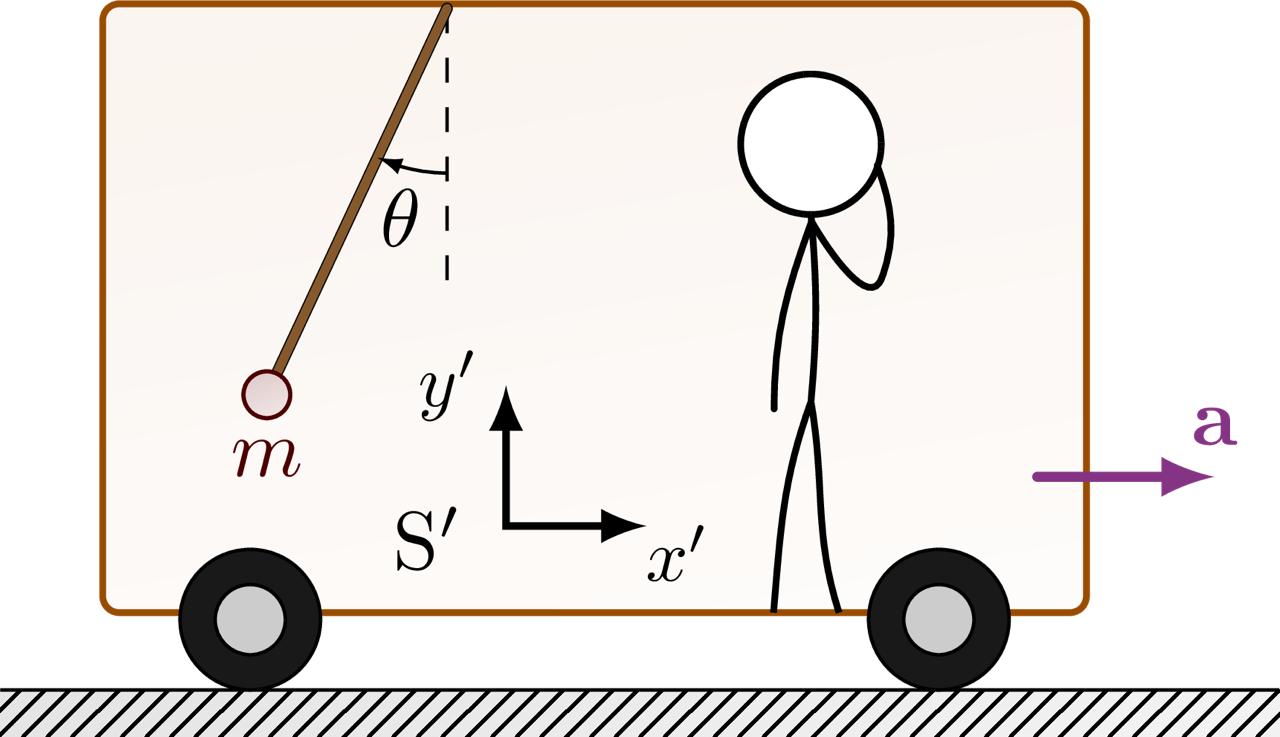
Quando falámos de referencial inercial referimo-nos a referencial sem aceleração, é importante lembrar que nas leis de movimento de Newton são válidas apenas neste tipo de referencial.
Sistema de coordenada geocêntrica equatorial (IJK)
Como o nome sugere, a origem do sistema está no centro da Terra e o plano fundamental é o equador terrestre. O eixo I aponta para o eixo vernal equinox, o eixo J é 90 graus Este (E) e o eixo K aponta em direcção o polo Norte (N). Este sistema de coordenada é sem rotação e assumimos ser fixo no espaço e é frequentemente referido como sistema de coordenada inercial fixo na Terra.
Um sistema de coordenada inercial fixo na Terra, rigorosamente falando não é fixo devido ao facto do equinócio (equinox) e plano equatorial variarem lentamente ao longo do tempo. O equador terreste não é fixo no espaço inercial. A força gravitacional do Sol e da Lua no equador terreste causam os movimentos de pressão (tem um período de aproximadamente 26000 anos) e nutação (tem um período de aproximadamente 18.6 anos).
Sistema de coordenada Terra – centralizada e Terra – fixada
O sistema de coordenado centrado pode girar com a terra e refere-se ao sistema de coordenada Terra – centralizada e Terra – fixada. A origem é o centro da Terra e o plano fundamental é o plano equatorial na época específica. O eixo principal é sempre alinhado com meridiano particular, geralmente, o meridiano de Greenwich. Este sistema é importante no processamento de observações de satélite e os cálculos são feitos para converter observações deste sistema para J2000 ou B1950.
Importância dos pontos de referência na orientação do satélite
Conhecer a atitude (orientação) do satélite é extremamente importante. O movimento do satélite é especificado pela sua posição, velocidade, atitude e pela orientação do movimento. As duas primeiras quantidades descrevem o movimento de translação do centro de massa do satélite e as duas últimas o movimento de rotação à volta do centro de massa.
A análise da atitude pode ser dividida em determinação, previsão e controlo.
A determinação de atitude é o processo de terminar (calcular) a orientação do satélite relativa a referencial inercial ou outro objecto de interesse.
A previsão da atitude é o processo de prever a orientação futura do satélite utilizando modelos dinâmicos para extrapolar o histórico da atitude.
O controlo de atitude é o processo de orientar o satélite numa orientação específica (direcção pré-determinada).
Os três processos mencionados acima são feitos com base nos sistemas de referência.
Conclusão
Para definirmos o sistema de coordenadas devemos fazer as quatro especificações que são: a origem, o plano fundamental, a direcção principal e o terceiro eixo.
Em física medir é comparar a grandeza padrão com a unidade. Para que se faça uma comparação é necessário no mínimo que haja dois objectos. A mesma analogia pode ser aplicada ao referencial. Um referencial pode ser inercial (sem aceleração) ou não-inercial (com aceleração), a mecânica newtoniana é governada pelas leis de Newton. Tais leis são válidas apenas em referenciais inerciais.
Portanto, os referenciais são de extrema importância na área espacial quando se trata de movimento ou da localização de um corpo no espaço.
Referências
- Lyon Richard. Geosynchronous Orbit Determination Using Space Surveillance Network Observations and Improved Radiative Force Modeling. Department of Aeronautics and Astronautics, MIT, May 14, 2004;
- Wertz James. Spacecraft Attitude Determination and Control. Kluwer academic publishers, 1980;
- K. Kikóine, A.K. Kikóine. Física 2. Mir Moscovo, 1986.
Autor:
Joaquim Luvuvamo Cardoso Daniel
Especialista em Suporte a Navegação Balística
Licenciado em Física Nuclear Aplicada, pela Universidade Agostinho Neto.
Outros Artigos
-

-

-

-

SATÉLITES NA AGRICULTURA ANGOLANA.
 08/07/2020
08/07/2020
-

SATÉLITES: APLICAÇÕES E SERVIÇOS.
23/07/2020
Outras Notícias
-

GOVERNO MODERNIZA SERVIÇOS DE METEOROLOGIA.
08/08/2019
-

-

-
-
